Интеллектуальный опыт вождения Huawei ADS3.0: «сквозная» технология — это новая технологическая стена

«Умные» характеристики интеллектуального вождения с системами помощи водителю быстро меняются вместе с быстрым ростом уровня проникновения транспортных средств на новых источниках энергии.
После того, как система Pilot Assisted Driving установила итерацию технического маршрута от «с изображениями» к «без изображений», «сквозная» цель стала новой целью в области интеллектуального вождения.
В начале этого года Tesla выпустила первую версию FSD v12 Supervised, оснащенную «сквозной моделью нейронной сети», за ней последовал ряд OEM-производителей, находящихся в авангарде интеллектуального вождения, в том числе Hongmeng Zhixing, Ideal и Xpeng. Массовое производство «сквозного» умного вождения — одна из важных целей на второе полугодие.
Недавно Дунчэхуэй также испытал на себе «сквозную» интеллектуальную эффективность вождения новейшей системы Huawei ADS 3.0 на дорогах общего пользования.
На самом деле, это весьма впечатляет.
Реальная производительность Huawei ADS3.0 «сквозная»: интеллектуальное передвижение с одного парковочного места на другое
Не смотрите на рекламу, смотрите на эффективность.
Больше всего пользователей беспокоит то, как «сквозная» система ADS3.0 будет работать на дороге. На уровне реального приложения Huawei ADS 3.0 реализует физическую сквозную связь «от парковочного места до парковочного места» .

Ранее мы провели тест-драйв первого Xiangjie S9, оснащенного Huawei ADS3.0. Благодаря «сквозной» модели бионической нейронной сети Xiangjie S9 может ездить по всей стране и имеет следующие функции: запуск с парковочного места, запуск с дороги, остановка на дороге, изменение пункта назначения в любое время и автономное пересечение ворот A. Серия обновлений интеллектуальных возможностей вождения, таких как машины, направлена на использование интеллектуального вспомогательного вождения, чтобы проникнуть во все сценарии и добиться «вождения везде, где есть дорога».

Официально запланированный маршрут тест-драйва тоже весьма интересен. Мы стартовали прямо из подвала отеля Four Seasons в Сучжоу, а пунктом назначения был подвал отеля Renaissance Taihu. Весь путь составил более 40 километров и занял около часа.

Поскольку подземные парковки в обоих местах были отсканированы и могут быть распознаны навигационной системой как «часто используемые парковочные места», мы можем сопоставить парковочное место в подвале отеля Four Seasons с парковочным местом в подвале отеля. Нажмите на кнопку «Умное вождение» на рулевом колесе, и Xiangjie S9 быстро припаркуется с парковочного места и выедет из подвала отеля Four Seasons.

Несмотря на то, что вход в подвал отеля Four Seasons представляет собой очень узкий прямоугольный изгиб, S9 это не смутило. Он вцепился в стену и умело выехал. Ворота распознавания также могут автоматически замедляться и ждать, пока рычаг будет поднят, прежде чем ускоряться.

Дороги в парке отеля изначально не показаны на навигационной карте, но возможности Xiangjie S9 по восприятию окружающей среды и принятию решений были улучшены. Он позволяет не только избегать экспресс-транспорта, но и избегать временных препятствий.
Он также был очень спокоен при движении по кругу. Он завершил круг на относительно высокой скорости и очень быстро повернул рулевое колесо.

Сцену разворота, которую раньше нужно было выполнять, теперь не нужно выполнять с помощью ADS3.0. Умный водитель просто поворачивает рулевое колесо, и разворот завершен.

Чувство распознавания светофора также стало более острым. Когда мигает зеленый свет, транспортное средство уже уловило его, сделало прогнозы заранее и автоматически медленно замедлилось, устойчиво останавливаясь перед красным светом.
При столкновении с некоторыми сложными сценариями раскрываются комплексные преимущества ADS 3.0. В сцене, где необходимо занять крайнюю правую полосу, требуемая полоса занята, а дорожная разметка нечеткая, Xiangjie S9 решительно отменяет смену полосы движения и выбирает ускорение, плавность сравнима с Как у настоящего водителя-ветерана. , он сделал прогнозы заранее.

На шоссе Xiangjie S9 больше не нужно брать на себя управление при подъеме и спуске по съезду, и он может быстро реагировать даже на постоянную смену полосы движения.

Единственным недостатком является то, что смена полосы движения происходит так же активно, как и прежде. Даже в стандартном состоянии я чувствую, что во многих случаях не требуется намеренно менять полосу движения. После смены полосы движения все равно приходится перестраиваться обратно. Учитывая, что начальники часто сидят на заднем ряду в Xiangjie S9, такой опыт смены полосы движения должен подвергнуться критике со стороны начальства, не так ли?
Возможно, Xiangjie S9 может рассмотреть специально настроенную версию для интеллектуального вождения, которая менее агрессивна при смене полосы движения и может ездить более безопасно? Чтобы облегчить эту ситуацию, мы можем попытаться установить для предпочтения смены полосы движения NCA значение «мягкое» по умолчанию, что уменьшит частоту смены полосы движения для обгона. Мы также можем рассмотреть возможность изменения стратегии смены полосы движения при интеллектуальном вождении на ручное подтверждение. Но таким образом маловероятно достичь интеллектуального вождения с полным нулевым поглощением.
Наконец, мы успешно прибыли к входу в отель «Ренессанс», нашему пункту навигации, а затем Xiangjie S9 плавно и автоматически въехал в подземный гараж, нашел целевое парковочное место и припарковался самостоятельно. Благодаря полному NCA и нулевому поглощению достигается сквозное интеллектуальное вождение от парковочного места к парковочному месту.

Я думаю, что проще для понимания и более полно использовать физическую сквозную производительность от парковочного места до парковочного места для измерения ценности комплексного интеллектуального вождения.
Благодаря поддержке «сквозной» модели интеллектуальные характеристики вождения ADS 3.0 больше соответствуют нашему субъективному представлению об интеллектуальном вождении. Она больше похожа на водителя-человека, а эффективность дорожного движения также значительно улучшилась.
На этот раз, если господин Юй снова скажет, что «(Huawei ADS) бесконечно близок к L3», сомнений должно быть гораздо меньше.
Каковы различия в «сквозном» техническом плане Huawei ADS 3.0?
В решении для интеллектуального вождения ADS 2.0 компания Huawei предложила сеть GOD, основанную на лазерном синтезе, которая взаимодействует с сетью рассуждений о топологии дороги RCR для достижения интеллектуальных характеристик вождения «вождения с изображениями или без них», позволяя транспортным средствам идентифицировать объекты реального мира на дороге. свои собственные универсальные препятствия, в основном человеческие способности восприятия, и, в конечном итоге, массовое производство для достижения безкартовых интеллектуальных возможностей вождения NCA, на которых можно будет ездить «по всей стране».

▲ Сеть Huawei ADS 2.0 BEV+GOD+RCR
Среди них сеть GOD (общее обнаружение препятствий, общая сеть обнаружения препятствий) может использовать лидар + камеру для идентификации объектов особой формы за пределами общего белого списка препятствий, например, игра «Minecraft», используя для построения 3D-пиксельные блоки. Она может не только определять динамическое и статическое состояние препятствий, а также сопоставлять и различать машины скорой помощи, полицейские машины, пешеходов и т. д.
▲ Схема алгоритма обнаружения Бога (изображение с официального сайта Huawei)
Благодаря сети GOD интеллектуальная система вождения больше не имеет верхнего предела распознавания препятствий на дороге и может по-настоящему «понимать объекты».
▲ Инопланетное препятствие «Мир» (фото с официального сайта Huawei)
Сеть RCR (Road Cognition & Reasoning, сеть рассуждений о топологии дорог) призвана еще больше освободить интеллектуальное вождение от использования высокоточных карт, объединить его с обычными навигационными картами для сопоставления и проверки реальности, а затем использовать датчики, чтобы опрокинуть и нарисовать доступную карту. карта в реальном времени.
Благодаря сети RCR интеллектуальная система вождения может осуществлять «конкретный анализ конкретных дорожных условий» и по-настоящему «понимать дорогу».

Видно, что предыдущее интеллектуальное вождение было основано на логике исследований и разработок «восприятие – планирование (решение) – контроль», которая заключается в передаче данных датчиков в систему управления для сопоставления и идентификации, а затем выдачи команд управления для управления. автомобиль за рулем.
Если «этот вопрос» (информация о состоянии дорожного движения), полученный датчиком, задан в банке вопросов (информация об обученных функциях), то управляющая сторона может дать «правильный ответ» (правильный план принятия решений), позволяя Автомобиль прекрасно адаптируется к текущим дорожным условиям.
Ведь дорог тысячи, и безопасность превыше всего. Дорожные условия быстро меняются. При столкновении с некоторыми неподготовленными сценариями интеллектуальная система вождения будет в растерянности и может только подсказать водителю-человеку взять на себя управление транспортным средством.
Чтобы улучшить эффективность управления интеллектуальным вождением и позволить интеллектуальному вождению управлять автомобилем, как люди, интеллектуальная система вождения должна уметь думать, как люди .
В результате в интеллектуальном вождении начали внедряться большие языковые модели, такие как ChatGPT, которые построены на основе огромных нейронных сетей. Система интеллектуального вождения напрямую использует «сквозную модель» для обработки сенсорных данных, полученных от датчиков. процесс, завершение суждения и принятия решений и, наконец, выведение инструкций по контролю.
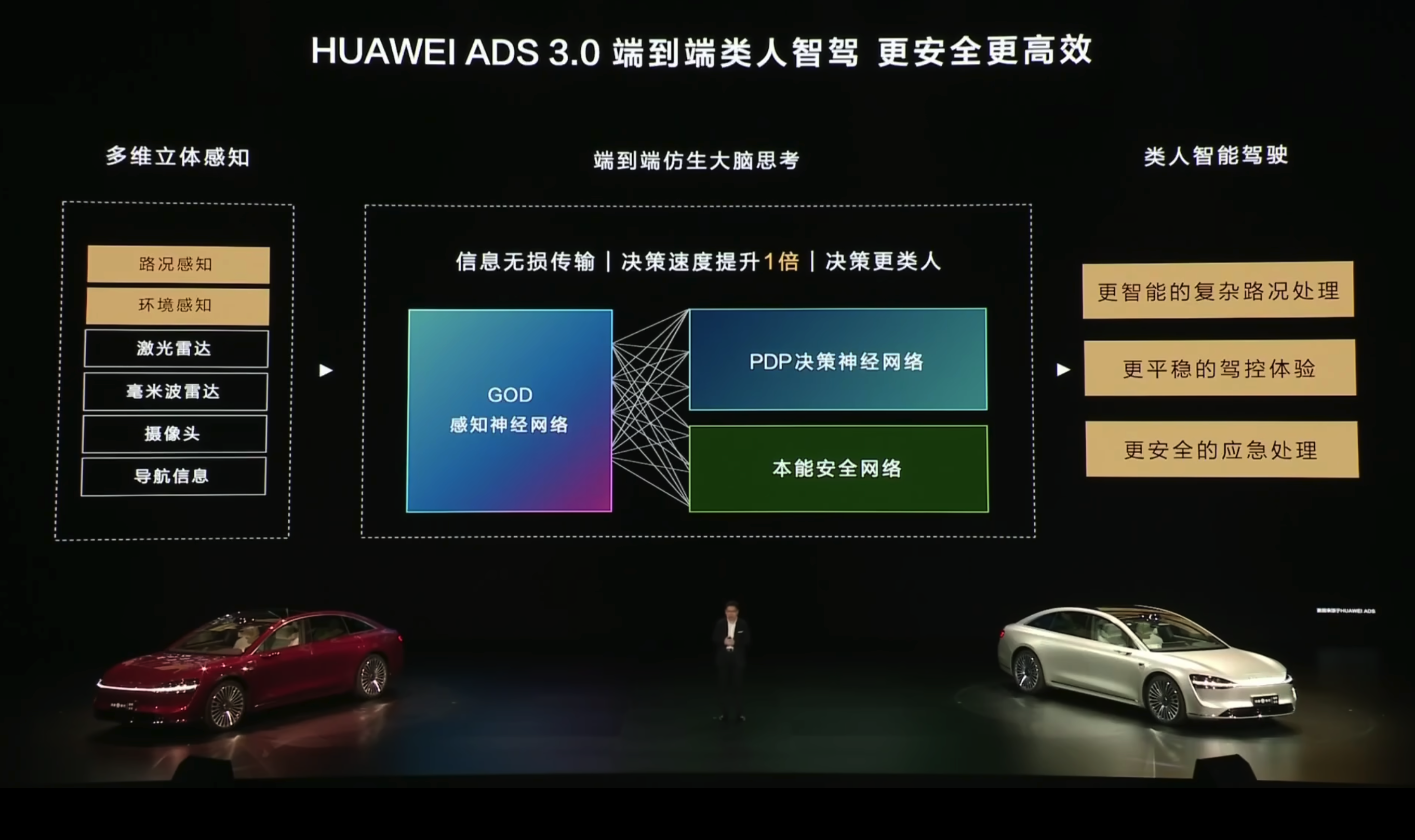
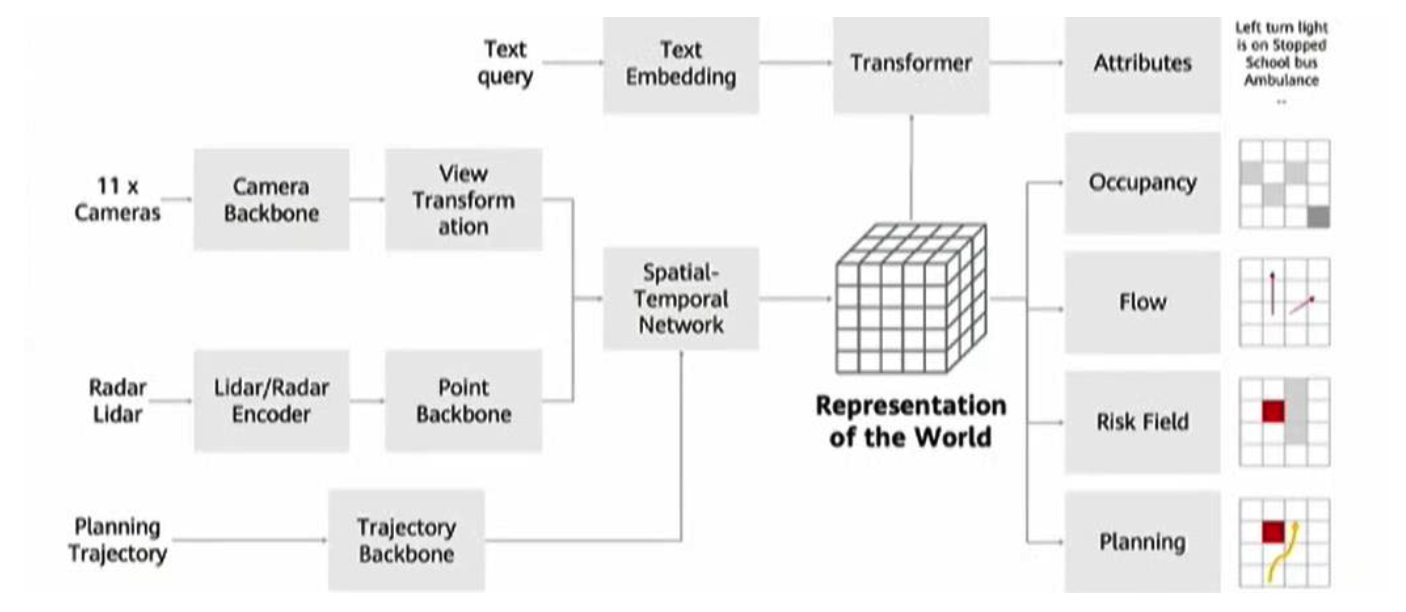
В ADS 3.0 компания Huawei преобразовала БОГА и RCR в нейронные сети и включила эту часть алгоритма в полную нейронную сеть восприятия БОГА, а затем передала данные восприятия в нейронную сеть принятия решений PDP для планирования маршрута движения и вывода результатов. «Результаты мышления.
После создания модели нейронной сети GOD+PDP компания Huawei использовала собственную облачную платформу обучения искусственному интеллекту для проведения большого объема обучения данных, что позволило быстро итеративно обновлять модель.
После того, как ADS3.0 улучшит возможности многомерного трехмерного восприятия сети GOD и использует PDP для «сквозного» принятия решений, он может достичь de-BEV и обновить исходное «понимание объектов». к «пониманию дорог» . Пусть интеллектуальная система вождения «понимает сцену вождения» более эффективно и точно, самостоятельно справляется со сложными дорожными условиями со скоростью принятия решений с малой задержкой и чаще обеспечивает пользователям плавное, уверенное и беспрепятственное управление. опыт умного вождения.
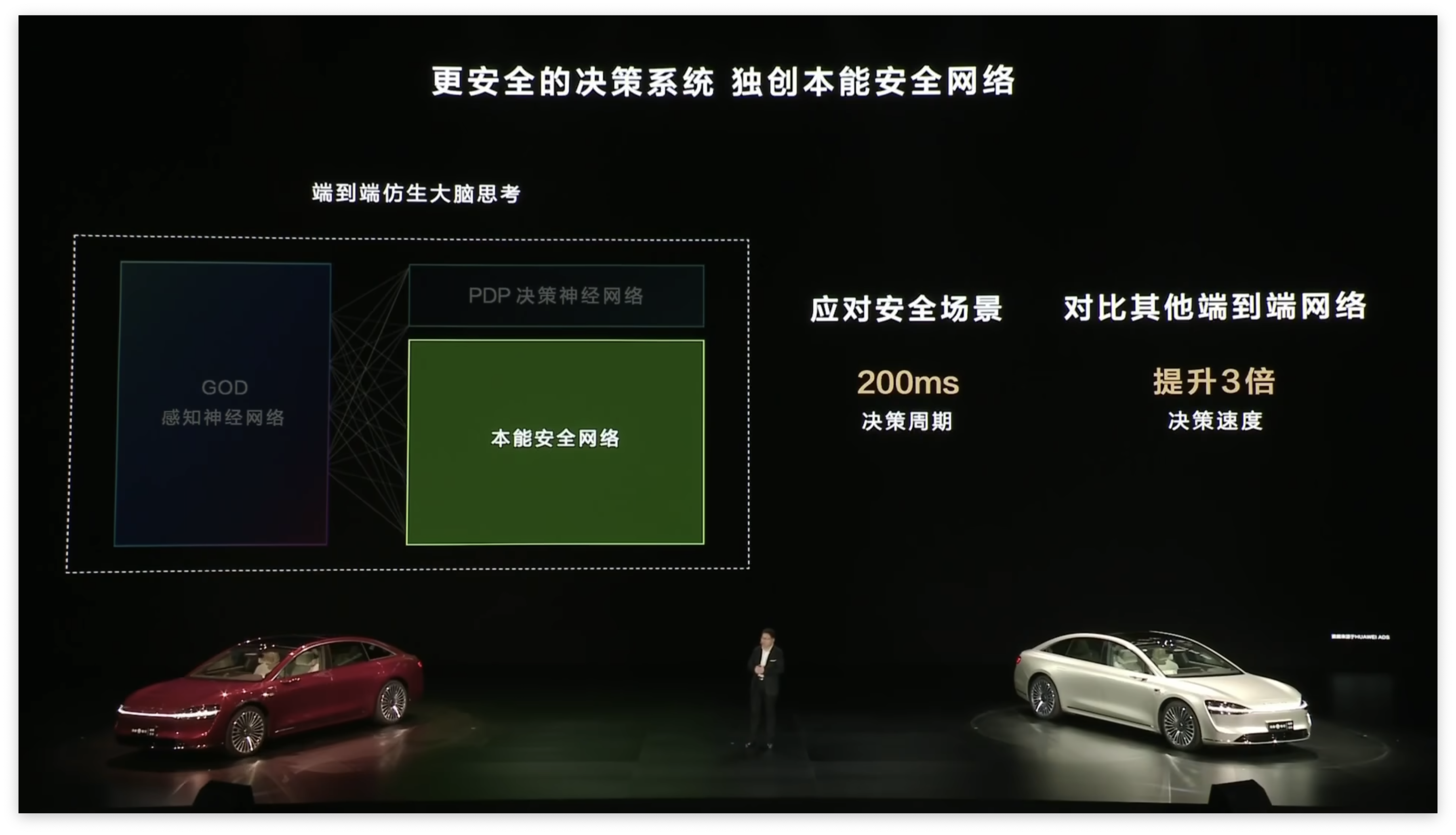
Однако, согласно текущим первоначальным результатам обучения, позволять ИИ сидеть прямо на водительском сиденье и управлять автомобилем все еще слишком радикально. В настоящее время в сквозную модель Huawei также добавлена «инстинктивная сеть безопасности», охватывающая нижний предел интеллектуального вождения , гарантируя, что нейронная сеть принятия решений не выйдет за красную линию безопасности.
У Синьчжоу однажды упомянул, что в долгосрочной перспективе сквозная модель будет работать параллельно с традиционным стеком автономного вождения. Первоначально сквозная модель будет работать в теневом режиме для сравнения вождения человека, традиционных стеков и сквозного управления. -конечные алгоритмы в одном и том же сценарии. Поведенческие различия в результатах и точная настройка на основе обратной связи между людьми могут быть параллельными традиционному стеку технологий, и после зрелости они могут дополнять друг друга; быть прекращено.
Сквозные алгоритмы подобны гениальному мальчику в младенчестве. Хотя в будущем он может стать врачом, ему нужны учителя начальной и средней школы, которые будут обучать его, когда он вырастет. Это роль нынешнего традиционного человека. стек Со временем, сквозной Он в конечном итоге вырастет в могущественного «эксперта», который может стоять в одиночку.
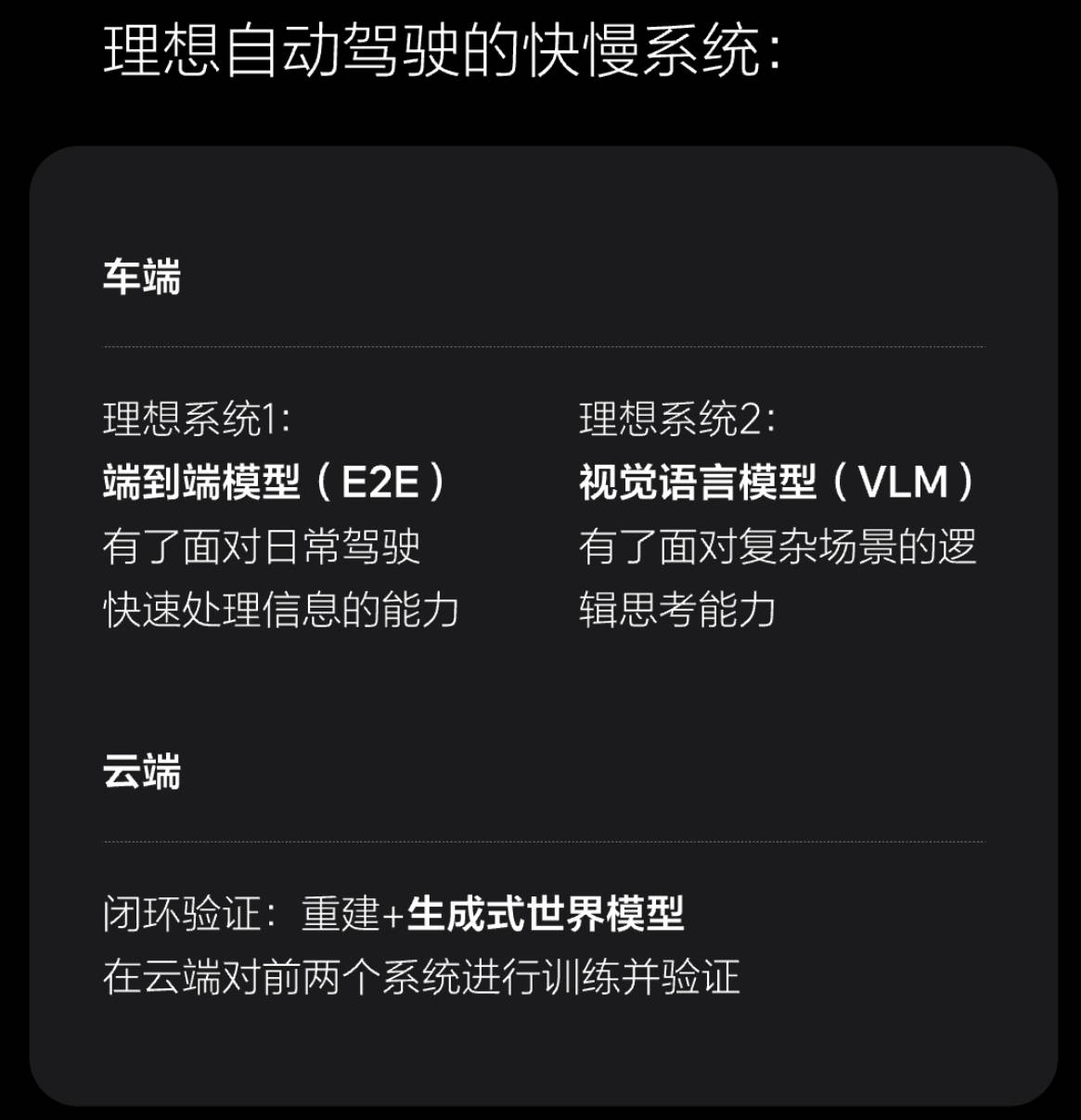
Таким образом, будь то комплексный бионический мозг Huawei ADS3.0, быстрая/медленная система Ideal AD или архитектура Xnet+Xbrain+Xplanner от Xpeng, значительные усилия были предприняты между комплексным принятием решений и создание и контроль транспортных средств. Множество ограничений и мер по дублированию.
Вообще говоря, текущая цель сквозного интеллектуального вождения состоит в том, чтобы упростить архитектуру интеллектуальной системы вождения, использовать единую модель нейронной сети для выполнения задач восприятия и принятия решений всей интеллектуальной системы вождения, уменьшить зависимость на массивных кодах правил сцены и тем самым улучшить. Фактический эффект умного вождения соответствует реальным потребностям пользователей в умном вождении.
Если мы посмотрим на предыдущую стратегию умного вождения, не говоря уже о нулевом переходе от умного вождения с одного парковочного места на другое, с точки зрения движения по круговому перекрестку и разворота, умное вождение редко может двигаться нормально и автономно. время он должен предупредить водителя-человека о том, чтобы он взял на себя управление.
Проще говоря, основываясь на реальном комплексном опыте ADS 3.0, большие модели используются для того, чтобы сделать интеллектуальное вождение более похожим на человеческое. На нем можно ездить со всей страны, и на нем можно ездить, когда есть дорога после модернизации.
Комплексное умное вождение является общей тенденцией, и автомобильные компании изо всех сил пытаются ее догнать.
Китайские автомобили быстро прогрессируют в электрификации и интеллекте, что меняет предпочтения и выбор потребителей в отношении автомобилей. Среди них умное вождение стало заметной особенностью интеллекта новых энергетических транспортных средств, а понимание потребителями и восприятие умного вождения растет с каждым днем.
Выбор спроса на потребительском рынке, в свою очередь, побудил автомобильные компании более тесно заняться электрификацией и интеллектом. Только хорошо поработав над умными кабинами и умным вождением, мы сможем закрепиться во второй половине интеллектуального развития.
Поэтому те автомобильные компании, которые не обладают выдающимися конкурентными преимуществами в умном вождении, всеми силами пытаются компенсировать недостатки умного вождения.

Как и недавно вызывавший споры Ji Krypton, через несколько месяцев после запуска Ji Krypton 001 2024 года была немедленно выпущена модель 2025 года. Новая вычислительная платформа была обновлена с двойной Mobileye EyeQ5H до двойной NVIDIA OrinX. Для сравнения, модель 24 имеет всего 48 Топс вычислительной мощности, а модель 25 — 508 Топс, что в десять раз мощнее.
Хотя этот шаг вызвал недовольство многих владельцев старых автомобилей, для Джи Криптона это было последней надеждой.
Согласно ответу Jikrypton, Jikrypton 001 2025 года будет выпущен в это время, чтобы удовлетворить больше потенциальных пользователей:
Система Haohan Intelligent Driving, оснащенная JKr 007, была хорошо принята пользователями и отраслью. Многие потенциальные пользователи JKr 001 призвали выбрать решение Haohan Intelligent Driving. В то же время наша собственная торговая марка NPS (Net Promoter Score, Net). Исследование Promoter Score) также показало, что умное вождение является фактором, который влияет на выбор пользователями Jikrypton 001. Поэтому мы приняли внутреннее решение запустить самостоятельно разработанное решение для интеллектуального вождения, чтобы предоставить пользователям еще один выбор.
По сравнению с решениями для интеллектуального вождения Mobileye, огромное количество самостоятельно разработанных решений для интеллектуального вождения, очевидно, может восстановить репутацию некоторых пользователей с точки зрения умного вождения. Однако я боюсь, что переход на интеллектуальное вождение, разработанный самостоятельно, произойдет слишком поздно. такая частота обновлений и обновлений обязательно повлияет на доверие потенциальных пользователей с точки зрения сохранения ценности.
В то время как студенты с плохими оценками по предметам полны решимости компенсировать свои недостатки упорным трудом, лучшие ученики уже приступили к изучению тем нового семестра.
Для тех автомобильных компаний, которые сделали «умное вождение» выдающимся брендом, таких как Hongmeng Zhixing, Xpeng, Ideal и т. д., они начали массовое производство и запуск непредставленных моделей умного вождения, которыми «можно управлять по всей стране», и теперь это даже подробнее Начните разработку комплексного интеллектуального решения для вождения для крупных моделей.

Все они преследуют одну и ту же цель: полностью покрыть путь пользователя от выхода из двери до входа в дверь, полностью оставив это на усмотрение интеллектуального вождения ИИ. По сравнению с традиционными решениями для интеллектуального вождения, которые следуют правилам, комплексные решения для интеллектуального вождения будут способствовать переходу интеллектуального вождения от разработки алгоритмов к разработке данных.
Чтобы сесть за сквозной покерный стол, вам нужно достаточно фишек.
При переходе от ADS1.0 к ADS2.0 команда ADS компании Huawei однажды раскрыла свою полнофункциональную систему обучения искусственному интеллекту, разработанную собственными силами.
Наиболее прочную основу и уверенность в создании крупномасштабной модели интеллектуального вождения дает собственная облачная платформа обучения искусственному интеллекту Huawei. На тот момент они уже использовали сверхвысокие вычислительные мощности, опережавшие большинство аналогов, для проведения обучения моделей 24 часа в сутки, достигая скорости обновления в одну итерацию каждые пять дней.

Что касается сквозной версии ADS3.0, то вычислительная мощность обучения и обучения была обновлена с 3,5E FLOPS, объявленных полгода назад, до 5E FLOPS (г-н Юй также сказал, что вычислительная мощность 3,5E FLOPS уже была второе и третье место в Китае вместе взятые), ежедневный тренировочный пробег модели достигает 35 миллионов километров. Более того, этот показатель вычислительной мощности не является конечной точкой для Huawei ADS, но он будет продолжать увеличивать инвестиции и продолжать совершенствоваться.
Поскольку интеллектуальное вождение становится все более глубоким, обучение крупных моделей искусственного интеллекта вождения неотделимо от огромных и разнообразных высококачественных данных. В то же время решающее значение также имеет автоматизированная система обработки данных высокого уровня. Можно сказать, что данные будут составлять до 80% затрат на исследования и разработки в области комплексной разработки интеллектуального вождения.
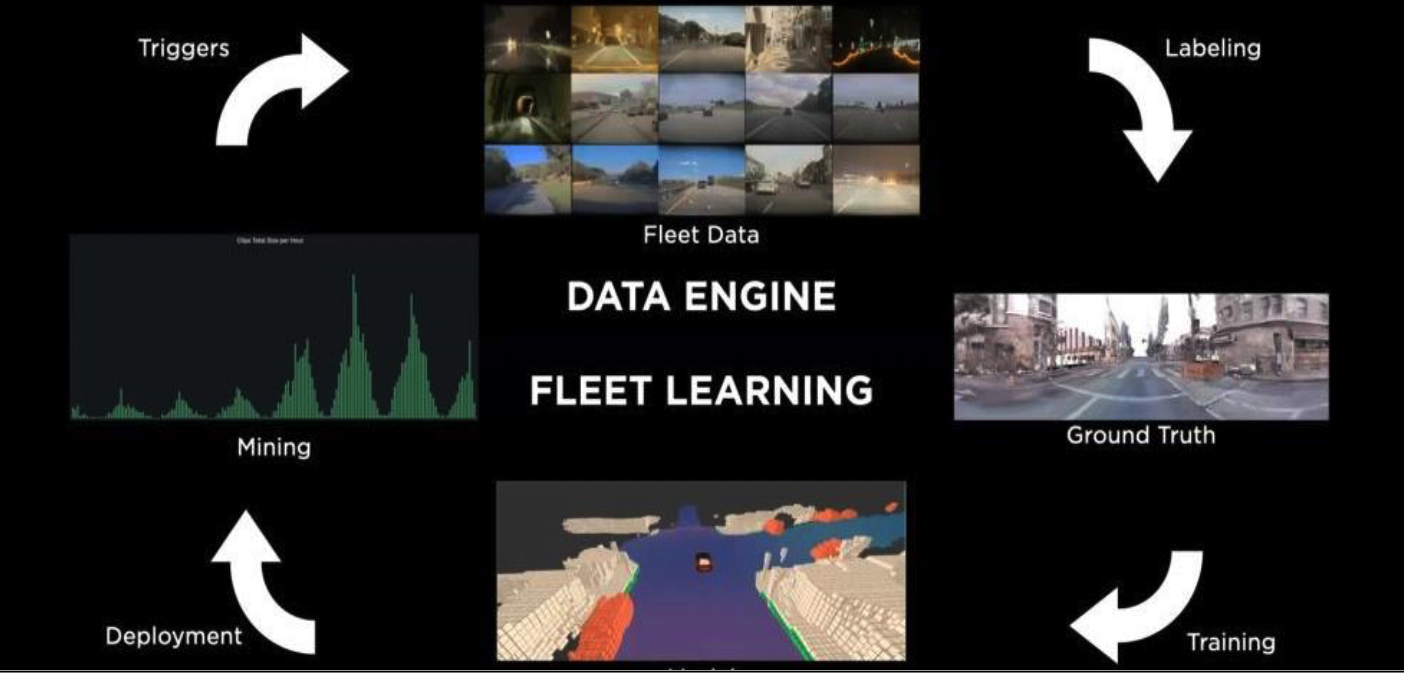
Подобно тому, как в больших языковых моделях ранее подчеркивалось большое количество параметров, сквозные мультимодальные модели также имеют большой спрос на данные. Tesla взяла на себя инициативу по реализации сквозной модели на FSD V12, и Маск однажды сказал:
Обучение с 1 миллионом фрагментов видео вряд ли достаточно; 2 миллиона — немного лучше; 3 миллиона — это ничего себе (вау);
Поэтому интеллектуальные транспортные средства, массово производимые автомобильными компаниями, становятся лучшими инструментами сбора данных. Когда на дорогах будет ездить достаточное количество серийных автомобилей с интеллектуальным вождением, собранные ими реальные данные станут ключевым ресурсом для непрерывной оптимизации и итерации алгоритмов интеллектуального вождения. 
▲Tesla Fleet. Изображение с официального сайта Tesla North America.
Согласно данным, опубликованным автомобильными компаниями, парк пользователей Tesla в Северной Америке насчитывает примерно 3-4 миллиона автомобилей; ожидается, что к концу 2024 года количество автомобилей, оснащенных интеллектуальной системой вождения Huawei, превысит 500 000; конец 2024 года. За квартал Lideal поставила более 700 000 автомобилей, и все модели в стандартной комплектации оснащены интеллектуальными функциями вождения AD. По состоянию на апрель 2024 года общее количество пользователей интеллектуального вождения NIO достигло 495 300, а общее количество пользователей; Число пользователей NOP+ достигло 245 800.
Таким образом, за огромной вычислительной мощностью скрываются силы самоисследований, обильные средства и высокая доля рынка.
Массового производства ADS3.0 от Huawei достаточно, чтобы доказать, что комплексная интеллектуальная модель вождения может быть серийно произведена и коммерциализирована. Это ведущий производитель, которому необходимо освоить ресурсы данных, достаточные средства и накопление технологий. твердо придерживаться правильного технического маршрута и сделать долгосрочные инвестиции.

С этой точки зрения, «сквозная» модель интеллектуального вождения, объединяющая мягкие и жесткие возможности, станет «стеной технологий искусственного интеллекта» для интеллектуального вождения.
Комплексное интеллектуальное вождение, на котором можно ездить по любой дороге, очевидно, является новым эталоном в области умного вождения. Однако за пределами технической стены все еще существует большое количество моделей автомобилей, которые не могут выполнить обещание умного вождения. на котором можно ездить по всей стране.
Игрокам, которые, наконец, смогут принять участие в соревновании по покерному столу «всестороннее умное вождение», нужна не только смелость, чтобы смотреть вперед, но и достаточное количество фишек. В краткосрочной перспективе игроков будет всего несколько.
# Добро пожаловать на официальную общедоступную учетную запись WeChat Aifaner: Aifaner (идентификатор WeChat: ifanr). Более интересный контент будет предоставлен вам как можно скорее.
Ай Фанер | Исходная ссылка · Посмотреть комментарии · Sina Weibo